Each of our students are required to complete a Capstone Project. This portfolio features some of the most impressive end-to-end projects demonstrating the skill and expertise of our graduates.
CAPSTONE
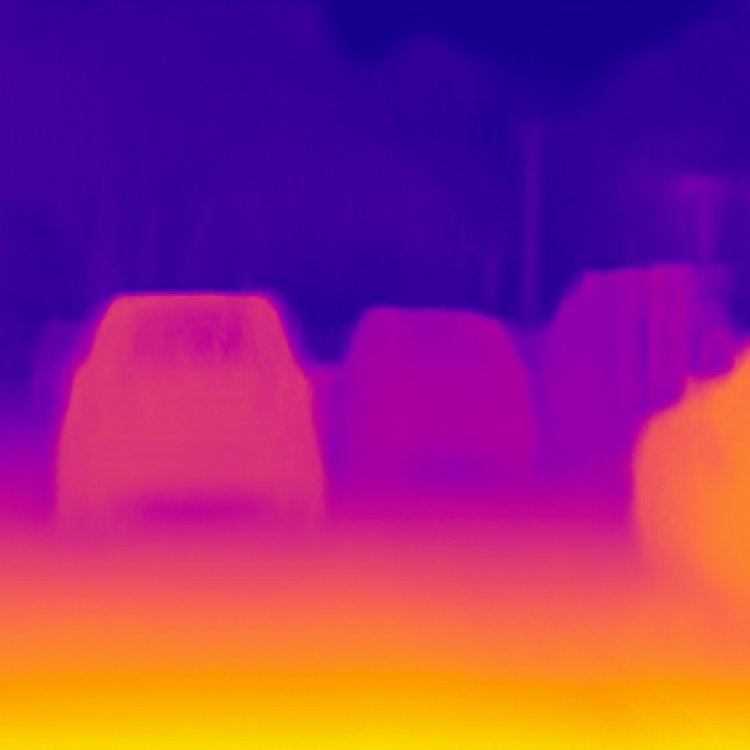
Depth Estimator
Depth estimation is at the core of visual perception for autonomous vehicles. Stereo cameras are crucial sensors for self-driving vehicles as they are low-cost and can be used to estimate depth. The project aims to focus on the challenges of monocular depth by stereo thus overcoming low reliability when deployed, limited field of view, expenses, real-time estimation. This project aims to use KITTI data.
Team:
Vinay Nooji, Mallori Harrell, Spatika Ganesh
- Topic:3D Computer Vision/
Project Repo
Presentation Video